Projects
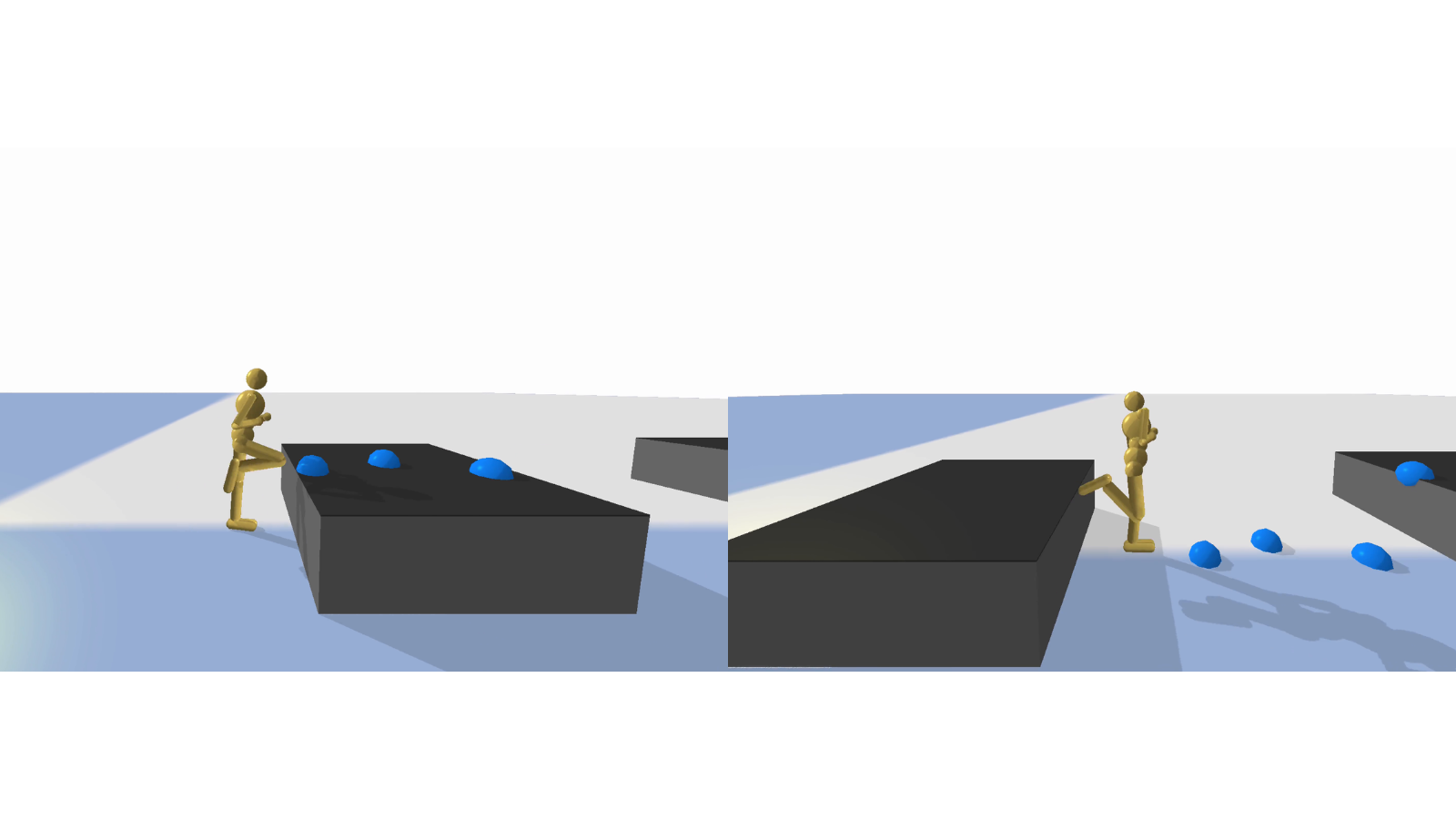
Planning with Diffusion via Constraint Verification for Physics-Based Characters
In Submission!
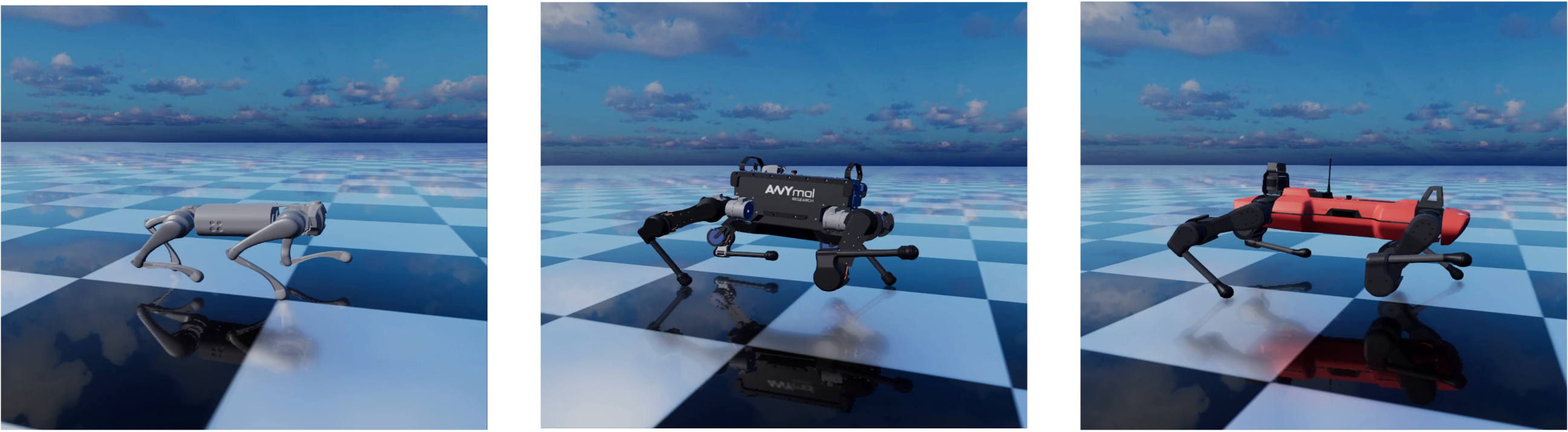

OpenSim2Real: An End-To-End Open Source Robotic Platform for Sim2Real Research
Engineering Capstone Project
In Submission!
Engineering Capstone Project